
Researchers at two leading US universities have created a unique recycling robot inspired by nature. They say it has a gripper that acts like a ‘Venus flytrap’, allowing it to pick up items that are 100 times its weight.
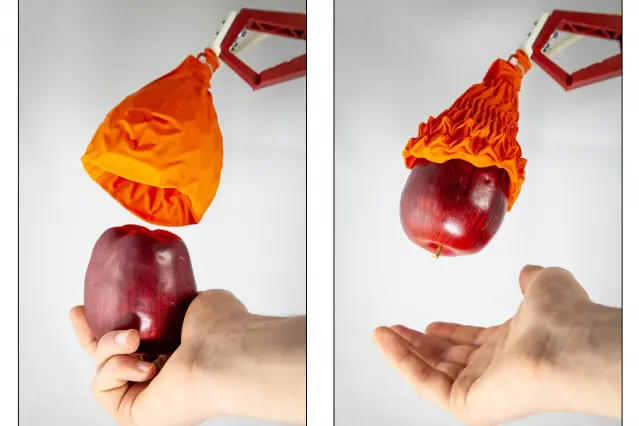
Harvard collaborated with Massachusetts Institute of Technology (MIT) on a bio-mimicry project. The objective was to enhance the automatic separation of waste materials. The new sorting system features a ‘strong’ gripper that has a hollow cone-shaped origami structure that ‘collapses in on objects’ in order to grab them off the belt (watch the video here).
The vacuum-powered sorting gripper basically ‘envelopes’ an entire object, explains MIT professor Daniela Rus. Her team combined the gripper with an existing sorting robot to test its strength on different objects. The gripper could grasp and lift objects 70% of its diameter with a weight of roughly 5 pounds.
In recent years, sorting systems were equipped with ‘fingers’ made out of soft, flexible, materials like rubber, Rus says. While this pliability lets robots pick up things like plastic bottles and pieces of cardboard, it keeps the systems from handling large or heavy items.
‘Previous approaches to could only handle very limited classes of objects – objects that are very light or objects that conform to shapes such as boxes and cylinders,’ Rus points out. Now, thanks to the ‘Magic Ball’ gripper, sorting of objects with a variety of shapes and weights is possible. The US researchers conducted successful tests with full wine bottles and unevenly shaped foods like broccoli.
The gripper has three parts: the origami-based skeleton structure, the ‘airtight skin’ to encase the structure, and the connector. As a next step, the team hopes to solve the problem of angle and orientation by adding computer vision. Rus says doing so would let the gripper “see” what’s on the belt, thus making it possible to grab specific parts of objects.
Don't hesitate to contact us to share your input and ideas. Subscribe to the magazine or (free) newsletter.